Week 3
Empathy Machine
Big Idea: create a technical working prototype that allows a human to experience an animal senses/locomotion or other animal processes in order to create empathy for that animal.

Facts about Starfish / Purple Sea Star
* Scientific Name: Pisaster ochraceus
* Family:Asteroidea
* Echinoderms/Phylum Echinodermata
* Carnivores/Marine invertebrates
* Wildy found in
Pacific NorthWest
* Indication of the water quality
*
Live Up to 35 years
* 4.7 to 9.4 inch
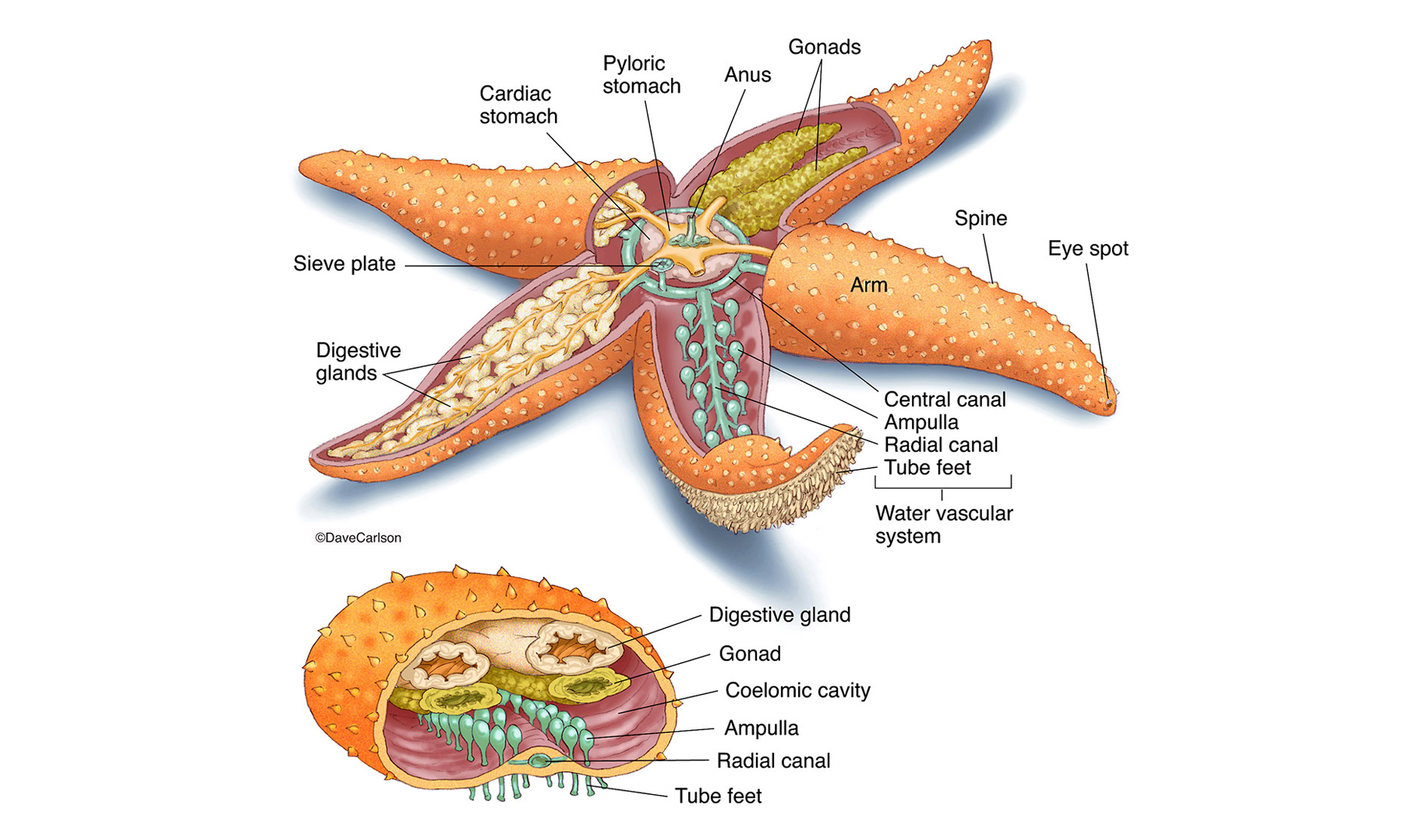
* An echinoderm
has no obvious left or right body, but top or bottom side
*
Not fish but echinoderm, closer to sea urchin or sand dollars
* They have tube feet or podia (Oceanicresearc.org)
*
expand and extract the tube feet, they walk
* “Benthic” –
Living at the bottom
* bilateral - Two sides
* bumps on
the body surface are called “Dermal Branchiae” - used to absorb
oxygen
* pedicellaria on the skin are used to pluck things off
* Madreporite - single colored spot–used to filter water
between the water vascular and the ocean
* The sea star has a
light-sensitive organs at the tip of each ray, called an eye spot.
It detects the presence and direction of light, and the seem to have
idea where it is headed
* Starfish has no brains or blood, but
its nervous system is spread through its arms
* Starfish have
one eye on each tip of the arm
Starfish' main cool features:
* Limbs regeneration
* Starfish’s “Eyes” and nervous system are spread on the
arms(no brain or blood), their entire arms are a connected sensor
* When feeding, starfish evert their stomach out through their
mouth and it goes back after digestion
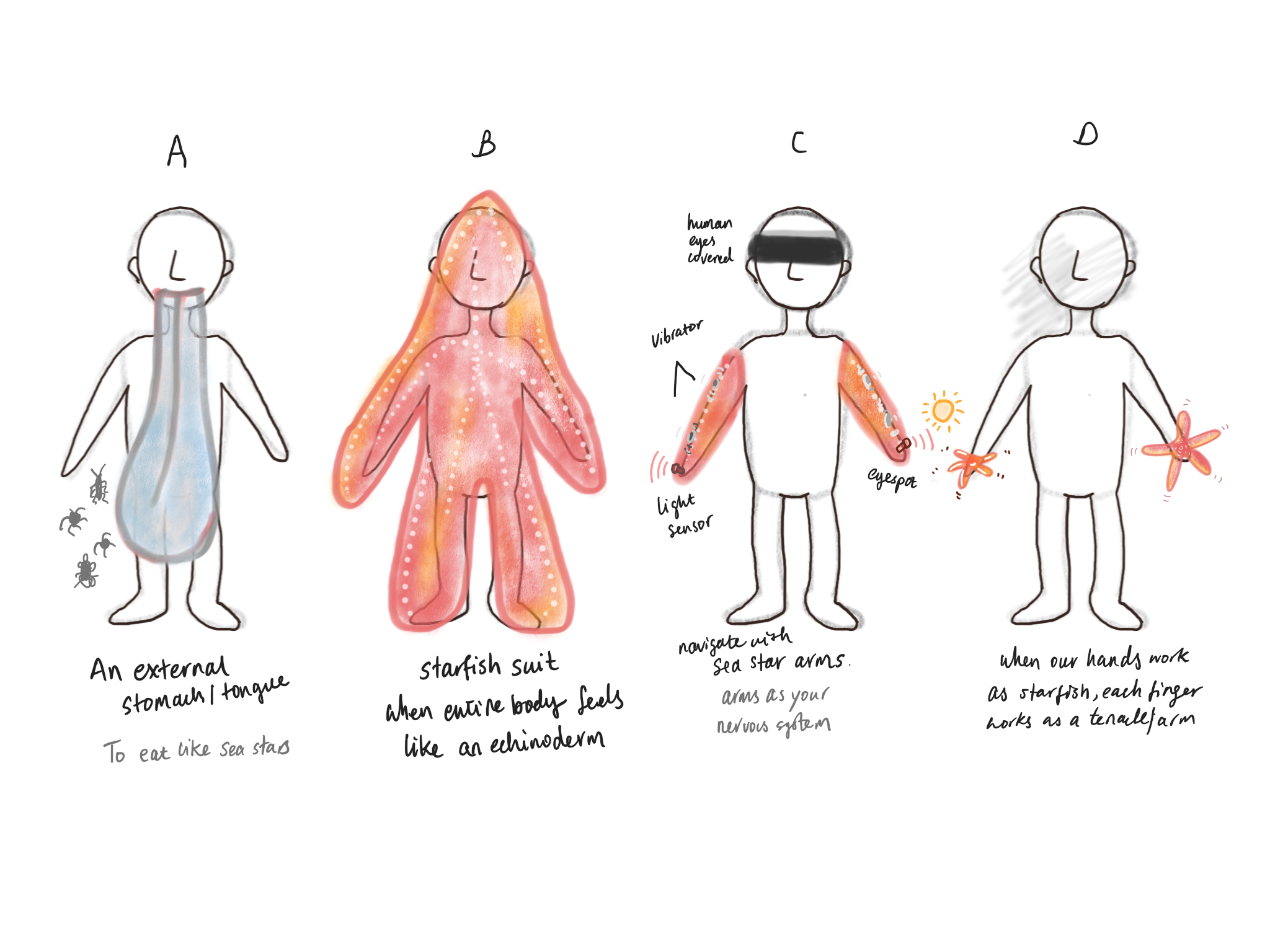
Empathy Machine ideas brainstorming :
* Eating outside of the body–an intensive tongue/external stomach to
grab food
* Regeneration of our body parts?
* With eyes
covered(sea stars don’t have eyes like us), and only use our hands
as our navigating tools and the nervous system. At tip of each arm,
there’s an “eyespot” that’s sensing the light, giving our arm
instruction of where to go
* When our human body functions as
a five-tenable sea star; We can only move on the floor with top and
bottom sides
* When our hands(five fingers) work as two sea
stars. At each finger tip, there’s a light sensor that’d give muscle
stimuli
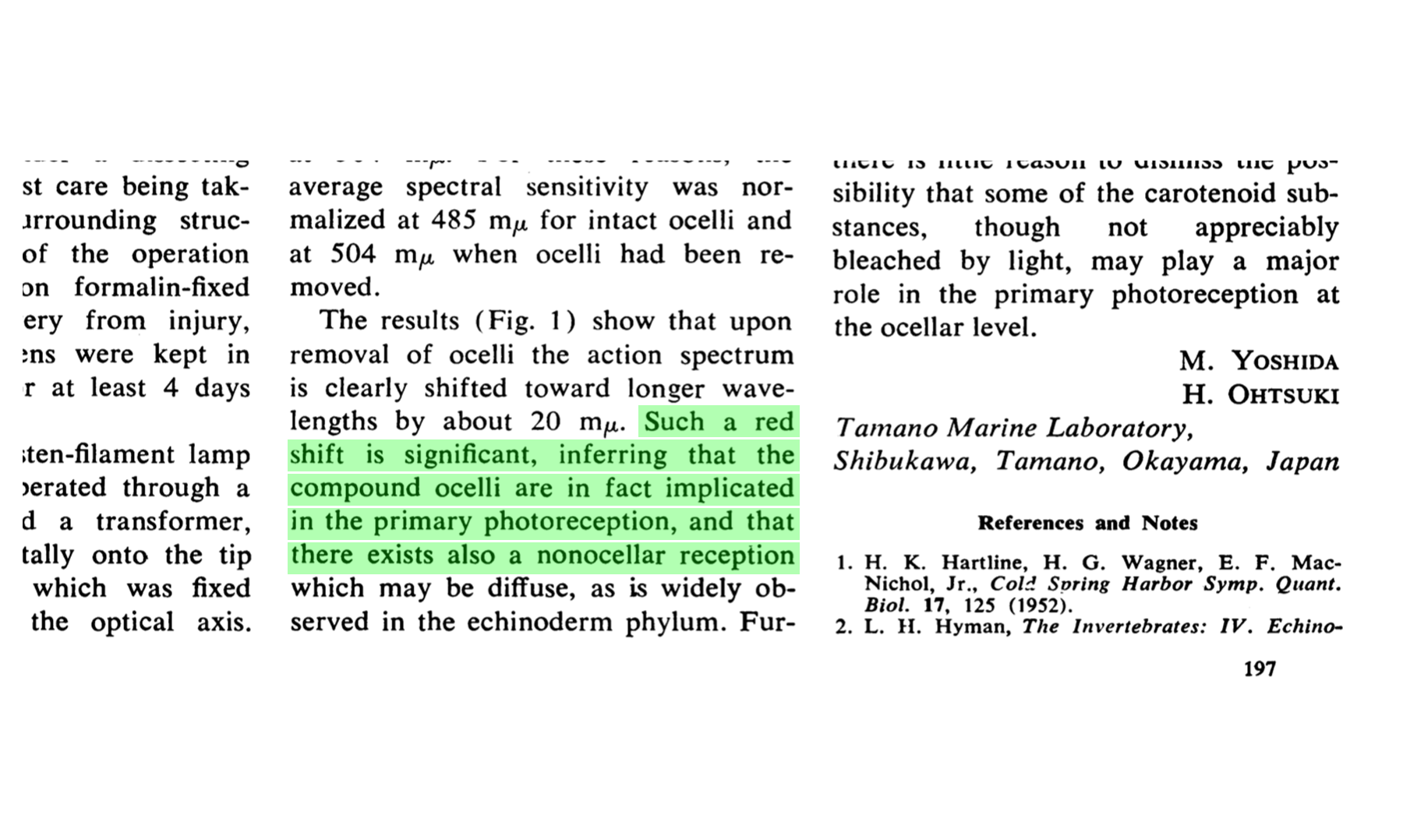
About “Eye Spot” – Compound Eyes
In Yoshida, Ohtsuki’s paper “Compound Ocellus of a starfish”, it was stated that starfish have a pigmented spot at the base of the terminal tenable, which is termed compound ocelots, optic cushion or eyespot. Such terms imply a photoreceptive function. In Yoshida and Ohtsuki’s experiment, they were trying to figure out how crucial compound ocelli are to starfish’s photoreceptor, aka their visual perception. They concluded that the compound ocelli are in fact implicated in the primary photoreceptor.

"Apparently, the dark appearance of the reef as opposed to the bright signal received from the open ocean."
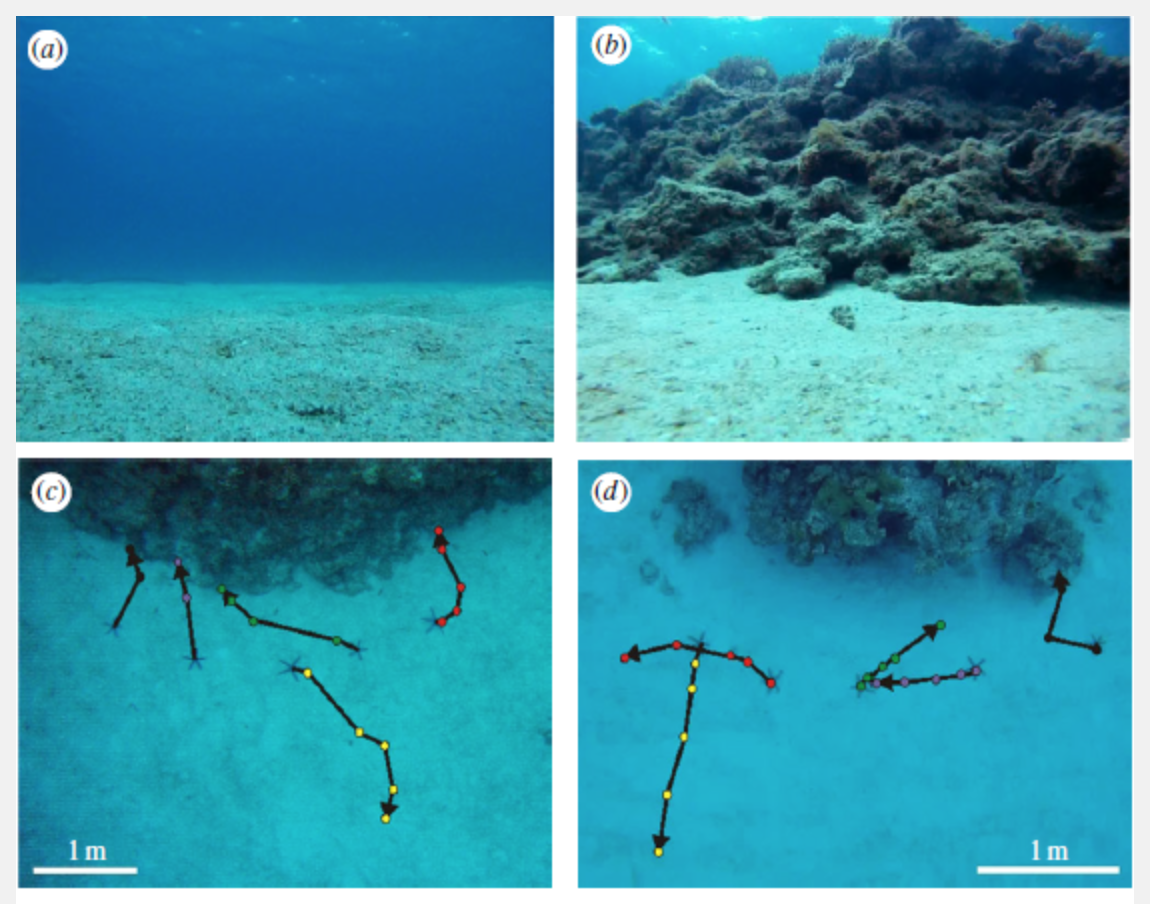
(c) Trajectories from sham operated (non-blinded) starfish.
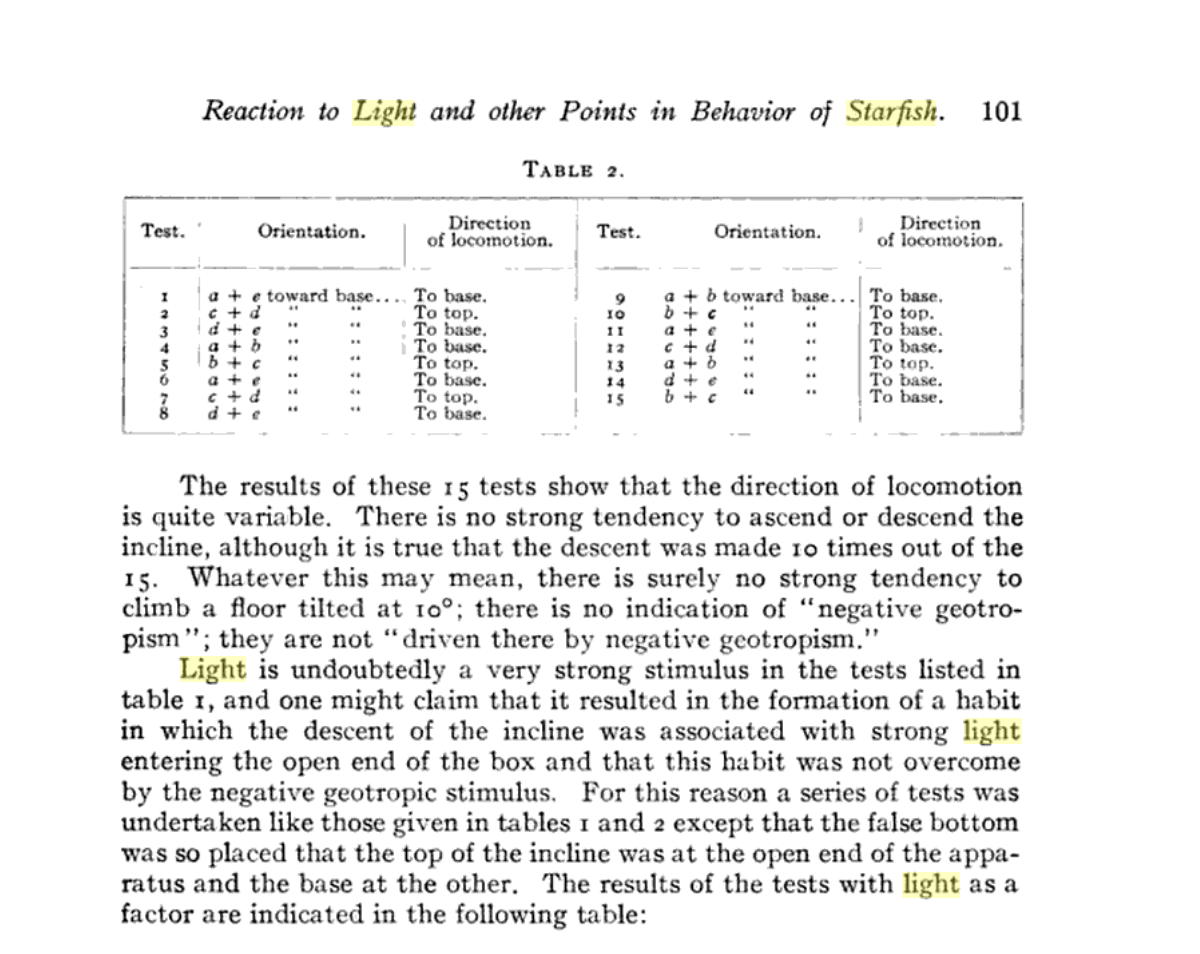
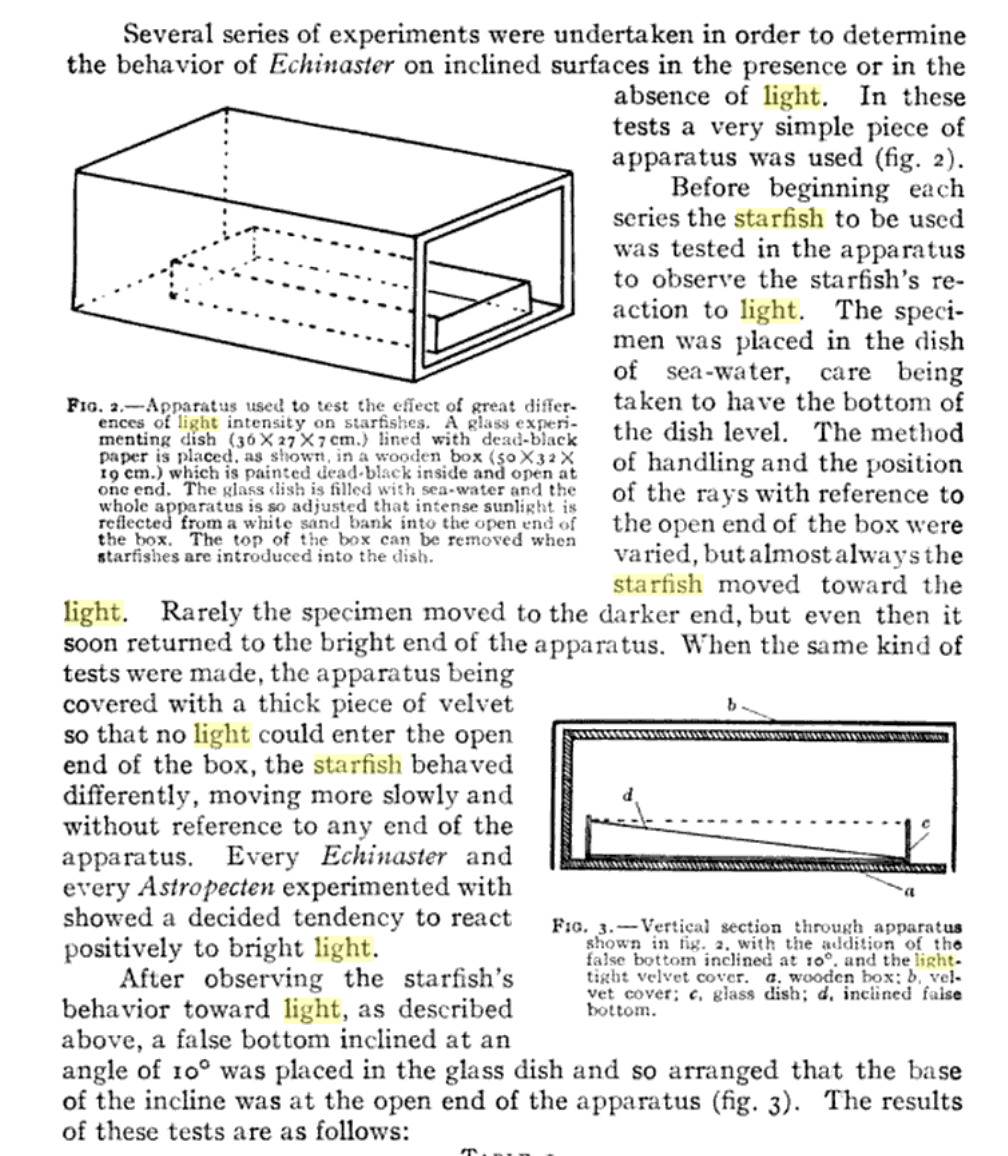
Understanding starfish’s locomotion in relation to its senses
In the issue 132 of Carnegie Institute of Washington Publication, the article “Reaction to Light and other points in the behavior of the starfish” by R.P. Cowles. Two variables scientists were testing that they hypothesize affecting starfish’s locomotion tendencies. The test result showed that there’s no strong tendencies for starfish, especially Echinaster to ascend or descent the incline, but light is “undoubtedly a very strong stimulus”, as they always try to move towards the brightest spot. Echinaster is not only sensitive to the brightest light, but also very dim light in a dark room. Meanwhile, temperature has an impact on their light sensitivity as well. As stated in the paper “When the water temperature is from 29 to 30 degree celsius, the reaction to light is at its optimum”.
Deliberation of Empathy machine prototype:
It’s incredible that starfish have a totally distinctive body structure, nervous system and navigation system from us. They don’t have eyes that see the world and receive signals as us, nor do they have brains that function and process directional signals like us. However, starfish arms/tentacles/limbs that function as their nervous system. At the tip of their arms, they have photoreceptor that function as their eyespots. The sensitivity to brightness level of the environment drive their locomotion as they always move slowly towards either the brighter spot or shader spot. It’d be very interesting for human to experience a navigation within an environment driven by photoreceptors at the tip of our arms.
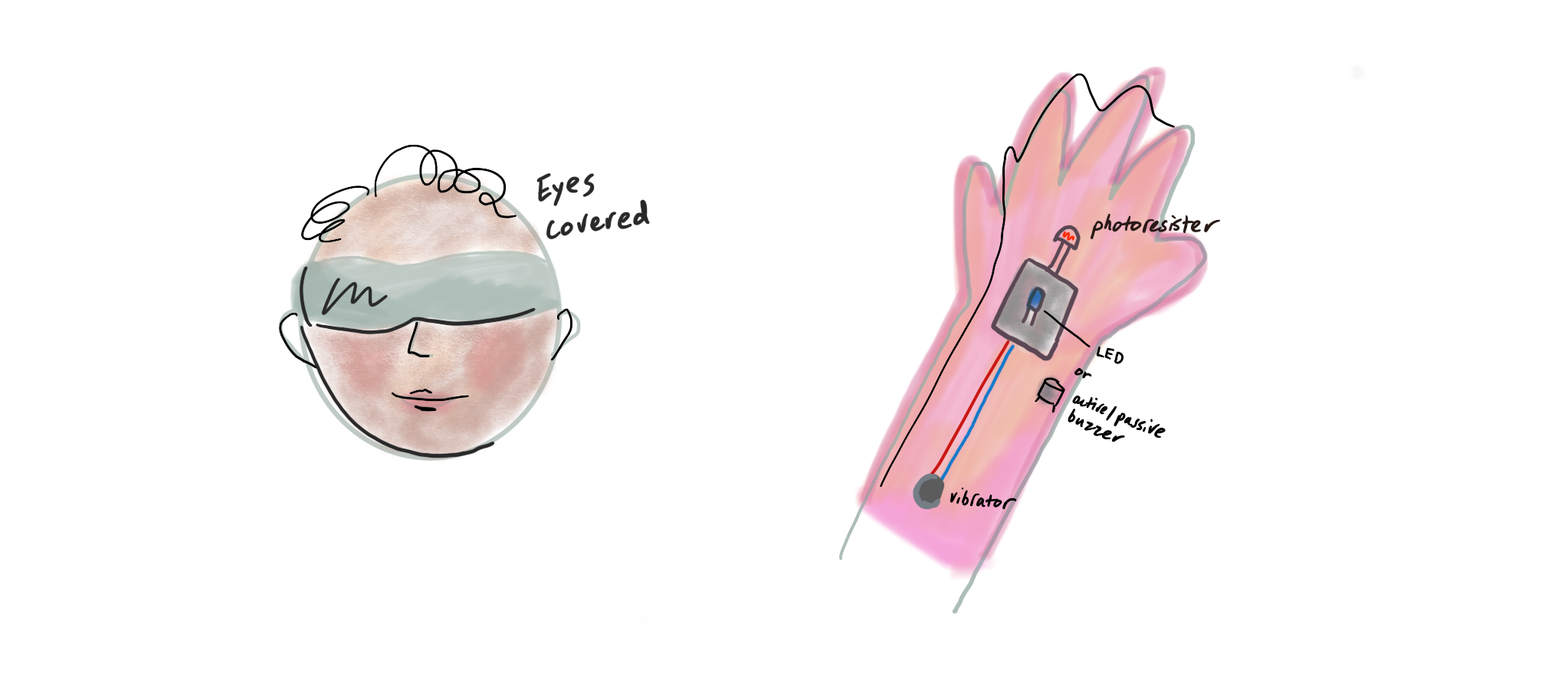
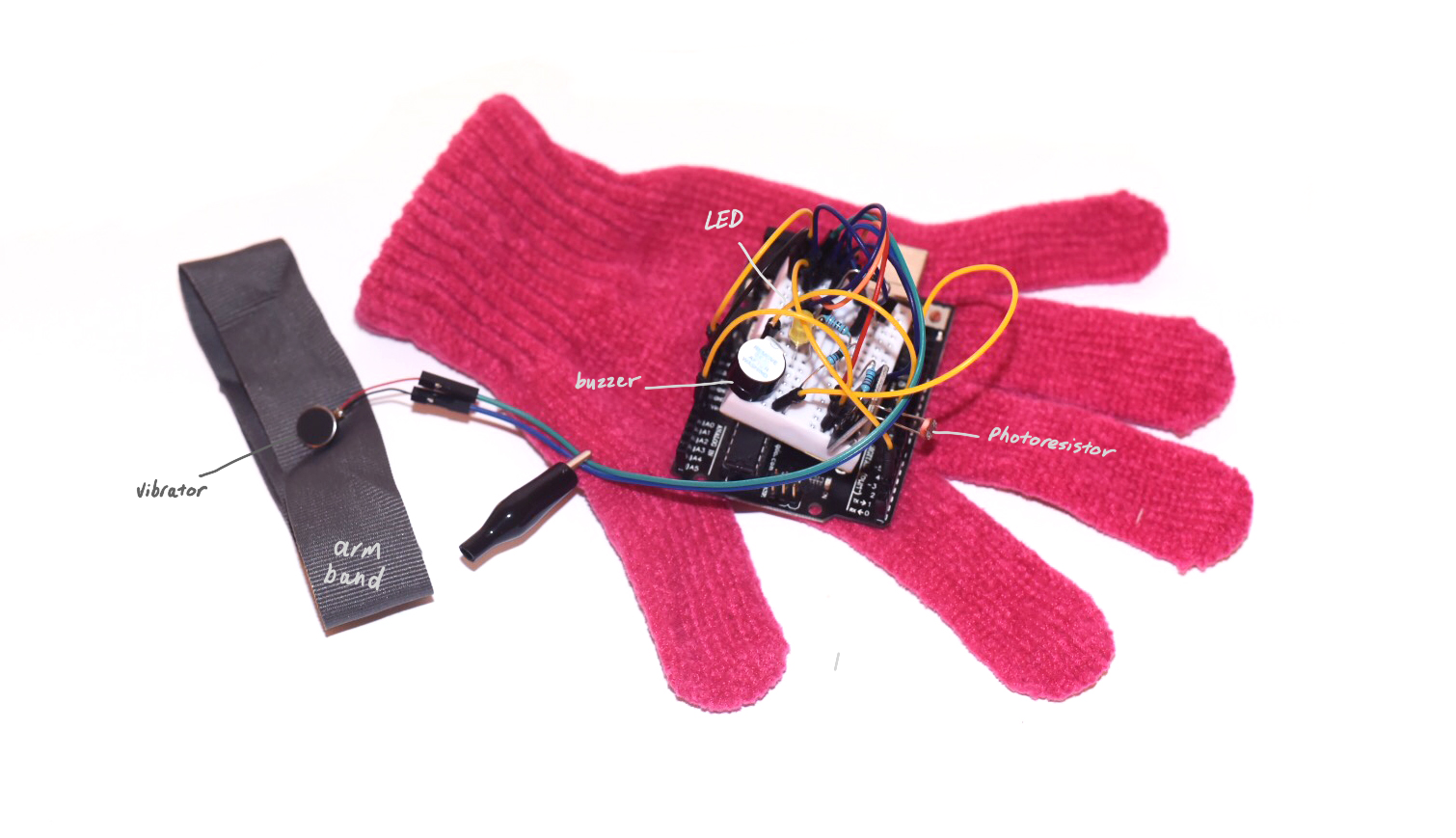
Technical Prototype idea:
I will install photoresists at the tip of an arm that detects the brightness levels of the environment. Small vibrators will be attached at different parts of the arms to function as the signal receivers of our “arm nervous system”. Our arms will receive vibration/or other indicative signals when a spot is very bright, so we can move towards it.
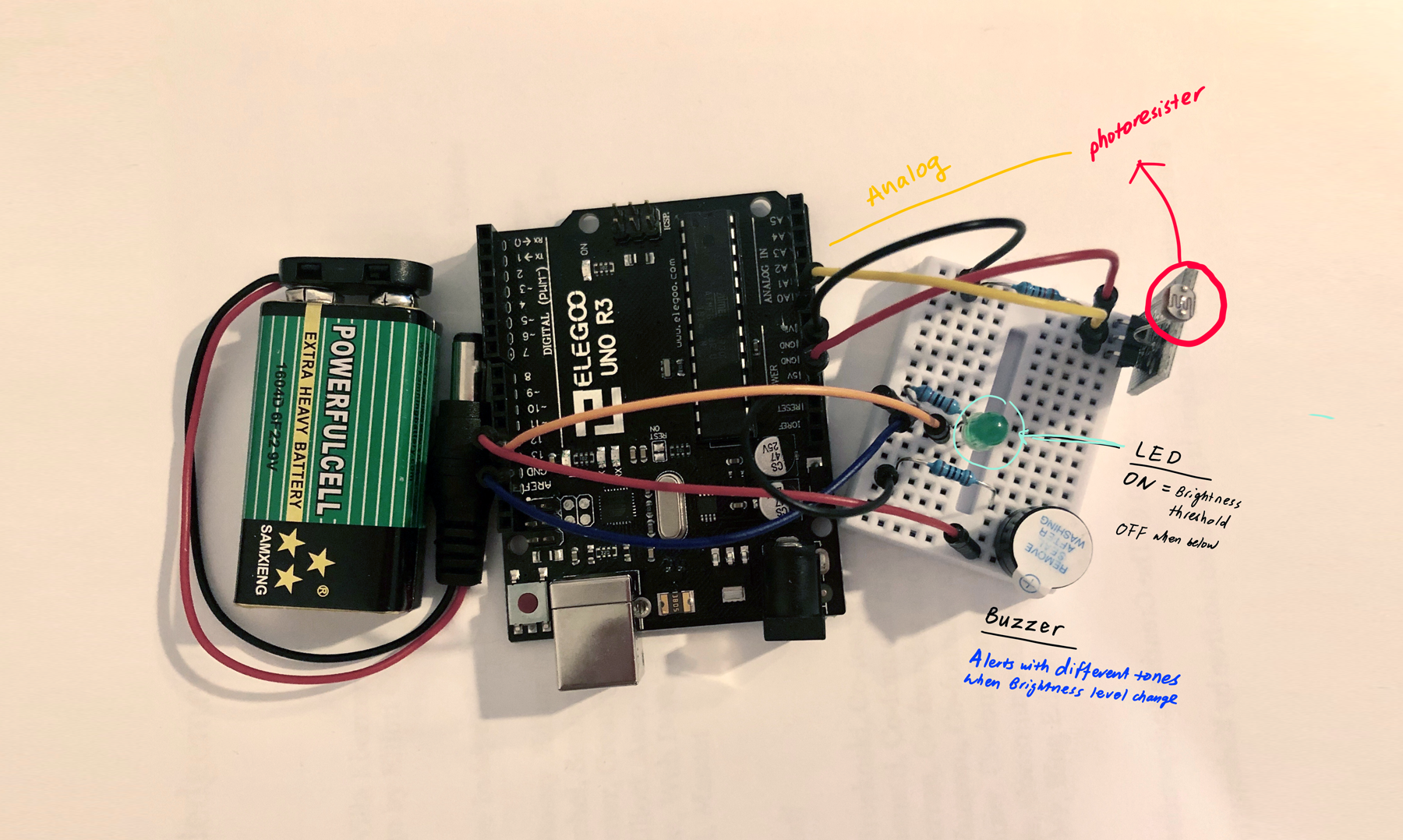
Prototype1: Testing Photoresister
With this attempt, I was testing if the photoresistor can successfully input analog data and if LED and buzzer can responds as the output. I set up a brightness threshold, and the LED light will lit up if the brightness level is above the threshold, and the buzzer will make different tones based on the photoresists analog input.
Feedback:
For the LED light, there’s only a threshold determining whether it’s
on or off. For the buzzer, there’s only four options of the tones
based on the group conditions. For the next iteration. The analog
data should map the tone.
Prototype2: Vibrator disk
With this attempt, I was figuring out how to successfully use the vibrator disk to imitate the signal the “Eyespot" would deliver to the nervous system in the arm, thus enabling the muscle to move.
Feedback: The vibrator disk is very sensitive and strong. It pulls the fabric and possibly affects another digital input. By simply feeling the vibration, it’s hard to distinguish where is the brighter direction to follow. For the next iteration, it’d be ideal if the brightness level can control the frequency of the vibration, so the user can get an idea that he/she is approaching the brighter areas.
Prototype3: Vibrator/Buzzer
In this attempt, the analog data from the Photoresistor is
successfully mapped to the frequency of the vibrator as well as the
pitch of the buzzer. When the environment is brighter, the interval
vibration lasts longer, so the user can get the idea whether he/she
is approaching the brighter or darker area by feeling how long the
vibration is. Meanwhile, for the buzzer, the brighter it gets, the
higher pitch the sound gets. Both tools will help human understand
the brightness level of the area without using eyes. Hopefully this
would help them navigate like how sea stars do.
const int vibrator = 2; int LED = 7; int photo = 0; int buzzer =11; void setup() { pinMode(vibrator,OUTPUT); pinMode(LED,OUTPUT); pinMode(photo, INPUT); pinMode(buzzer, OUTPUT); Serial.begin(9600); } void loop() { int Brightness = analogRead(photo); int beat = map(Brightness, 400,1023,10,600); int off = map(Brightness, 955,1000,1000,600); int buzzerTone = map(Brightness, 1020,200,1100,100); Serial.println(analogRead(photo)); if (Brightness > 300){ tone(buzzer,buzzerTone); // Serial.println("tone:"+buzzerTone); digitalWrite(vibrator, HIGH); digitalWrite(LED, HIGH); delay(beat); digitalWrite(vibrator, LOW); digitalWrite(LED, LOW); delay(1500); } else { digitalWrite(vibrator, LOW); digitalWrite(LED, LOW); delay(1500); noTone(buzzer); } }
Feedback: Without soldering the vibrator to the mother cables, the vibrator is very easily to fall off. Meanwhile, when both buzzer and vibrator are used at the same time, they seem to interfere with each others bit occasionally. It’s still far from being a functional wearable starfish hand, and the look needs to be improved as well.
User Testing

Next steps and User testing feedback:
*Solder the prototype because the vibrator is very fragile
*Test the sensor in a dark environment that's closer to the
bottom of the ocean
*The vibration works well, but it's hard
to navigate in a bright environment
*Try dark room then
navigate to the light source next time
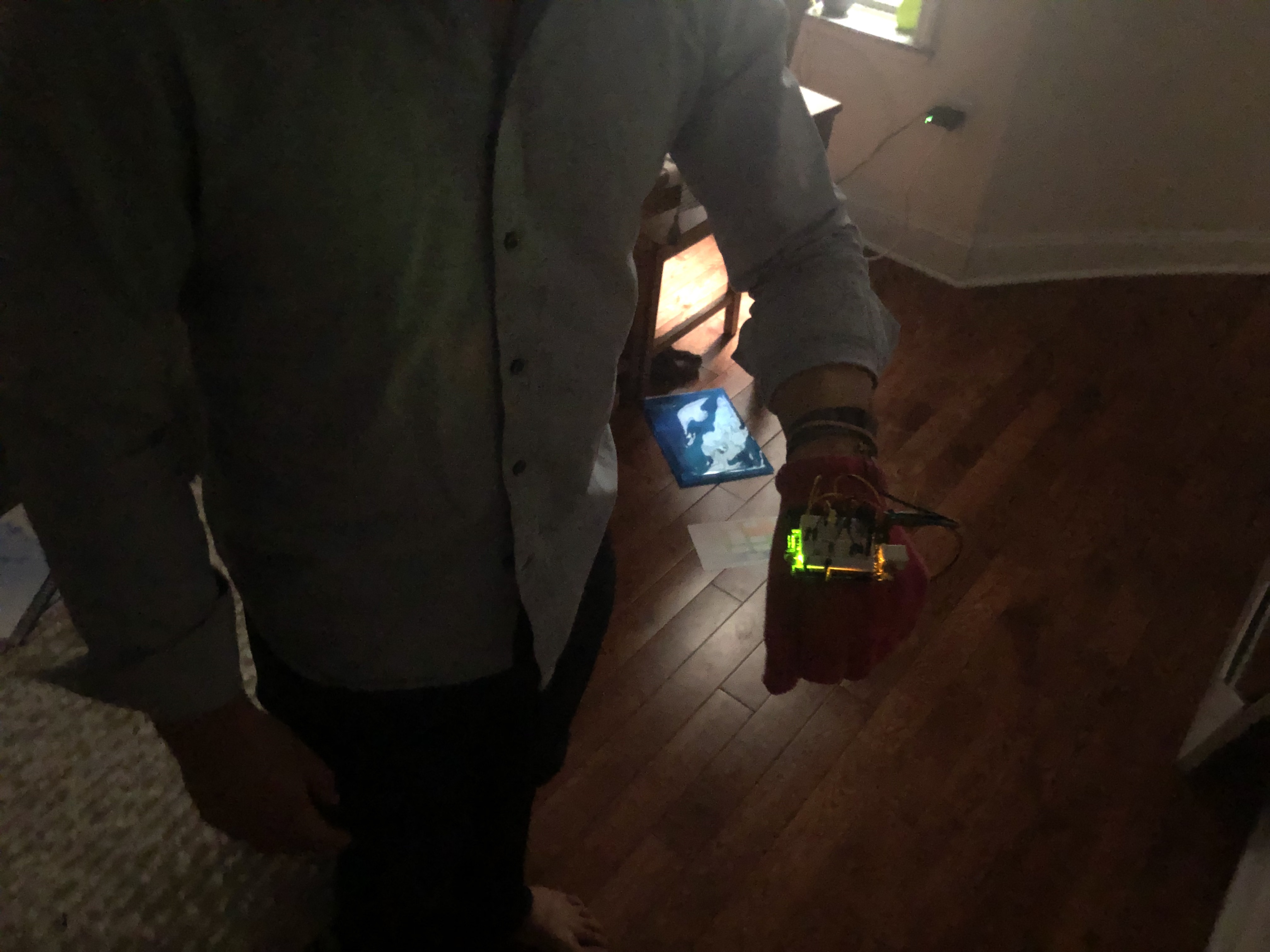
In-situation test
How does it feel like to behave and move like a starfish?
I asked my volunteer to put on the brightness detection glove and to
have his eyes covered. I asked him to use my living room as the
natural environment where he needs to find his optimal resting spot.
He was asked to move extremely slow, and navigate to a shade spot
from a bright spot with the vibration signal given through the glove
to his arm. He was able to clearly distinguish when he is by the
window(by the sun) versus moving into the dark spot of the room.
However, the glove got disturbed and eventually started to
become very unstable, giving him a constant wrong signal about the
brightness level of the environment. But ideally, my volunteer can
imagine, if the device functions normally, he’d be able to move to
the shade with the signal given from the glove.
I also asked
him to crawl on the floor with face down(just like a starfish with
only a top side and a bottom side), but he refused to do so. Still,
that would be something I would like my tester to experience in the
future as it’s an important part of the overall experience. Maybe I
will include a suit for my future iteration, so people don’t get
intimated by crawling on the floor.



References
http://www.oceanicresearch.org/education/wonders/echinoderm.html
https://www.thoughtco.com/starfish-anatomy-2291457
Carnegie Institution of Washington Publication, VolumnIII
http://www.learningaboutelectronics.com/Articles/Vibration-motor-circuit.php
http://tinkbox.ph/learn/tutorial/how-use-and-control-vibration-motor-using-arduino-uno
https://forum.arduino.cc/index.php?topic=424511.0
https://ecomorph.wordpress.com/2014/05/06/function-of-eyes-in-starfish/?fbclid=IwAR09Kp4heKHA0GFvCNzXUvAXwjujDQmtI2yJSASXkVYpduMQm_uAsU_MGuY